6. Convolutional Neural Networks
CNNs systematize this idea of spatial invariance, exploiting it to learn useful representations with fewer parameters. We can now make these intuitions more concrete by enumerating a few desiderata to guide our design of a neural network architecture suitable for computer vision:
-
In the earliest layers, our network should respond similarly to the same patch, regardless of where it appears in the image. This principle is called translation invariance.
-
The earliest layers of the network should focus on local regions, without regard for the contents of the image in distant regions. This is the locality principle. Eventually, these
def corr2d(X, K): #@save
"""计算二维互相关运算。"""
h, w = K.shape
Y = torch.zeros((X.shape[0] - h + 1, X.shape[1] - w + 1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i, j] = (X[i:i + h, j:j + w] * K).sum()
return Y
class Conv2D(nn.Module):
def __init__(self, kernel_size):
super().__init__()
self.weight = nn.Parameter(torch.rand(kernel_size))
self.bias = nn.Parameter(torch.zeros(1))
def forward(self, x):
return corr2d(x, self.weight) + self.bias
Pytorch 的Conv2D 实际是使用的是相关1:
X = torch.arange(9).reshape((1,1, 3, 3)).float()
conv = torch.nn.Conv2d(1, 1, 3, stride=1)
conv.weight = torch.nn.Parameter(torch.ones((1, 1, 3, 3)).float())
conv.weight.data[0,0,0,0]=0.0
X,conv.weight.data,conv(X)
Padding: 通常,如果我们添加 $p_h$ 行填充(大约一半在顶部,一半在底部)和 $p_w$ 列填充(左侧大约一半,右侧一半),则输出形状将为
\[(n_h-k_h+p_h+1)\times(n_w-k_w+p_w+1)。\]这意味着输出的高度和宽度将分别增加 $p_h$ 和 $p_w$。
在许多情况下,我们需要设置 $p_h=k_h-1$ 和 $p_w=k_w-1$,使输入和输出具有相同的高度和宽度。 这样可以在构建网络时更容易地预测每个图层的输出形状。假设 $k_h$ 是奇数,我们将在高度的两侧填充 $p_h/2$ 行。 如果 $k_h$ 是偶数,则一种可能性是在输入顶部填充 $\lceil p_h/2\rceil$ 行,在底部填充 $\lfloor p_h/2\rfloor$ 行。同理,我们填充宽度的两侧。
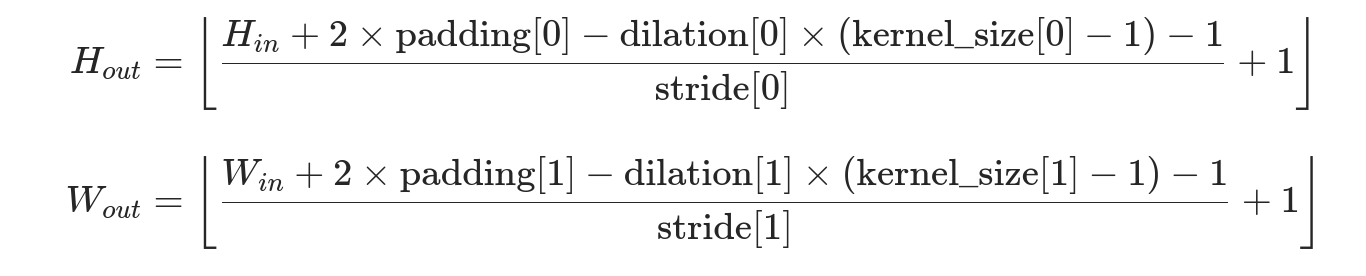
Stride: 通常,当垂直步幅为 $s_h$ 、水平步幅为 $s_w$ 时,输出形状为
\[\lfloor(n_h-k_h+p_h+s_h)/s_h\rfloor \times \lfloor(n_w-k_w+p_w+s_w)/s_w\rfloor.\]如果我们设置了 $p_h=k_h-1$ 和 $p_w=k_w-1$,则输出形状将简化为 $\lfloor(n_h+s_h-1)/s_h\rfloor \times \lfloor(n_w+s_w-1)/s_w\rfloor$。 更进一步,如果输入的高度和宽度可以被垂直和水平步幅整除,则输出形状将为 $(n_h/s_h) \times (n_w/s_w)$。
$1\times 1$ 卷积,即 $k_h = k_w = 1$,看起来似乎没有多大意义。 毕竟,卷积的本质是有效提取相邻像素间的相关特征,而 $1 \times 1$ 卷积显然没有此作用。 尽管如此,$1 \times 1$ 仍然十分流行,时常包含在复杂深层网络的设计中。它不识别空间模式,只是融合通道。
计算复杂度 $O(c_{i}c_{o}k_{h}k_{w}m_{h}m_{w})$
pooling layers: which serve the dual purposes of mitigating the sensitivity of convolutional layers to location and of spatially downsampling representations.
def pool2d(X, pool_size, mode='max'):
p_h, p_w = pool_size
Y = torch.zeros((X.shape[0] - p_h + 1, X.shape[1] - p_w + 1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
if mode == 'max':
Y[i, j] = X[i: i + p_h, j: j + p_w].max()
elif mode == 'avg':
Y[i, j] = X[i: i + p_h, j: j + p_w].mean()
return Y
LeNet

class Reshape(torch.nn.Module):
def forward(self, x):
return x.view(-1, 1, 28, 28)
net = torch.nn.Sequential(
Reshape(),
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Flatten(),
nn.Linear(16 * 5 * 5, 120), nn.Sigmoid(),
nn.Linear(120, 84), nn.Sigmoid(),
nn.Linear(84, 10))
X = torch.rand(size=(1, 1, 28, 28), dtype=torch.float32)
for layer in net:
X = layer(X)
print(layer.__class__.__name__,'output shape: \t',X.shape)
#@save
def train_ch6(net, train_iter, test_iter, num_epochs, lr, device):
"""用GPU训练模型(在第六章定义)。"""
def init_weights(m):
if type(m) == nn.Linear or type(m) == nn.Conv2d:
nn.init.xavier_uniform_(m.weight)
net.apply(init_weights)
print('training on', device)
net.to(device)
optimizer = torch.optim.SGD(net.parameters(), lr=lr)
loss = nn.CrossEntropyLoss()
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs],
legend=['train loss', 'train acc', 'test acc'])
timer, num_batches = d2l.Timer(), len(train_iter)
for epoch in range(num_epochs):
# 训练损失之和,训练准确率之和,范例数
metric = d2l.Accumulator(3)
net.train()
for i, (X, y) in enumerate(train_iter):
timer.start()
optimizer.zero_grad()
X, y = X.to(device), y.to(device)
y_hat = net(X)
l = loss(y_hat, y)
l.backward()
optimizer.step()
with torch.no_grad():
metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0])
timer.stop()
train_l = metric[0] / metric[2]
train_acc = metric[1] / metric[2]
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(train_l, train_acc, None))
test_acc = evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {train_l:.3f}, train acc {train_acc:.3f}, '
f'test acc {test_acc:.3f}')
print(f'{metric[2] * num_epochs / timer.sum():.1f} examples/sec '
f'on {str(device)}')
AlexNet[2012]

- AlexNet通过dropout控制全连接层的模型复杂度,而LeNet只使用了权重衰减。
- AlexNet在训练时增加了大量的图像增强数据,如翻转、裁切和变色。
- Sigmoid 变成Relu(缓解梯度消失)
- Max Pooling
net = nn.Sequential(
# 这里,我们使用一个11*11的更大窗口来捕捉对象。
# 同时,步幅为4,以减少输出的高度和宽度。
# 另外,输出通道的数目远大于LeNet
nn.Conv2d(1, 96, kernel_size=11, stride=4, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
# 减小卷积窗口,使用填充为2来使得输入与输出的高和宽一致,且增大输出通道数
nn.Conv2d(96, 256, kernel_size=5, padding=2), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
# 使用三个连续的卷积层和较小的卷积窗口。
# 除了最后的卷积层,输出通道的数量进一步增加。
# 在前两个卷积层之后,汇聚层不用于减少输入的高度和宽度
nn.Conv2d(256, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 256, kernel_size=3, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Flatten(),
# 这里,全连接层的输出数量是LeNet中的好几倍。使用dropout层来减轻过度拟合
nn.Linear(6400, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
# 最后是输出层。由于这里使用Fashion-MNIST,所以用类别数为10,而非论文中的1000
nn.Linear(4096, 10))
VGG Block/ VGG [2014]

经典卷积神经网络的基本组成部分是下面的这个序列:
- 带填充以保持分辨率的卷积层;
- 非线性激活函数,如ReLU;
- 汇聚层,如最大汇聚层。
The authors employed convolutions with 3×3 kernels with padding of 1 (keeping height and width) and 2×2 maximum pooling with stride of 2 (halving the resolution after each block).
def vgg_block(num_convs, in_channels, out_channels):
layers = []
for _ in range(num_convs):
layers.append(
nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1))
layers.append(nn.ReLU())
in_channels = out_channels
layers.append(nn.MaxPool2d(kernel_size=2, stride=2))
return nn.Sequential(*layers)
conv_arch = ((1, 64), (1, 128), (2, 256), (2, 512), (2, 512))
def vgg11(conv_arch):
conv_blks = []
in_channels = 1
# 卷积层部分
for (num_convs, out_channels) in conv_arch:
conv_blks.append(vgg_block(num_convs, in_channels, out_channels))
in_channels = out_channels
return nn.Sequential(
*conv_blks, nn.Flatten(),
# 全连接层部分
nn.Linear(out_channels * 7 * 7, 4096), nn.ReLU(), nn.Dropout(0.5),
nn.Linear(4096, 4096), nn.ReLU(), nn.Dropout(0.5),
nn.Linear(4096, 10))
Network in Network (NiN)

def nin_block(in_channels, out_channels, kernel_size, strides, padding):
return nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size, strides, padding),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1), nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1), nn.ReLU())
net = nn.Sequential(
nin_block(1, 96, kernel_size=11, strides=4, padding=0),
nn.MaxPool2d(3, stride=2),
nin_block(96, 256, kernel_size=5, strides=1, padding=2),
nn.MaxPool2d(3, stride=2),
nin_block(256, 384, kernel_size=3, strides=1, padding=1),
nn.MaxPool2d(3, stride=2),
nn.Dropout(0.5),
# 标签类别数是10
nin_block(384, 10, kernel_size=3, strides=1, padding=1),
nn.AdaptiveAvgPool2d((1, 1)),
# 将四维的输出转成二维的输出,其形状为(批量大小, 10)
nn.Flatten())
NiN 和 AlexNet 之间的一个显著区别是 NiN 完全取消了全连接层。 相反,NiN 使用一个 NiN块,其输出通道数等于标签类别的数量。最后放一个 全局平均汇聚层(global average pooling layer),生成一个多元逻辑向量(logits)。NiN 设计的一个优点是,它显著减少了模型所需参数的数量。然而,在实践中,这种设计有时会增加训练模型的时间。
GoogLeNet: Networks with Parallel Concatenations
- Inception block

class Inception(nn.Module):
# `c1`--`c4` 是每条路径的输出通道数
def __init__(self, in_channels, c1, c2, c3, c4, **kwargs):
super(Inception, self).__init__(**kwargs)
# 线路1,单1 x 1卷积层
self.p1_1 = nn.Conv2d(in_channels, c1, kernel_size=1)
# 线路2,1 x 1卷积层后接3 x 3卷积层
self.p2_1 = nn.Conv2d(in_channels, c2[0], kernel_size=1)
self.p2_2 = nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
# 线路3,1 x 1卷积层后接5 x 5卷积层
self.p3_1 = nn.Conv2d(in_channels, c3[0], kernel_size=1)
self.p3_2 = nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
# 线路4,3 x 3最大汇聚层后接1 x 1卷积层
self.p4_1 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.p4_2 = nn.Conv2d(in_channels, c4, kernel_size=1)
def forward(self, x):
p1 = F.relu(self.p1_1(x))
p2 = F.relu(self.p2_2(F.relu(self.p2_1(x))))
p3 = F.relu(self.p3_2(F.relu(self.p3_1(x))))
p4 = F.relu(self.p4_2(self.p4_1(x)))
# 在通道维度上连结输出
return torch.cat((p1, p2, p3, p4), dim=1)
- GoogLeNet

b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b2 = nn.Sequential(nn.Conv2d(64, 64, kernel_size=1),
nn.ReLU(),
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b3 = nn.Sequential(Inception(192, 64, (96, 128), (16, 32), 32),
Inception(256, 128, (128, 192), (32, 96), 64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b4 = nn.Sequential(Inception(480, 192, (96, 208), (16, 48), 64),
Inception(512, 160, (112, 224), (24, 64), 64),
Inception(512, 128, (128, 256), (24, 64), 64),
Inception(512, 112, (144, 288), (32, 64), 64),
Inception(528, 256, (160, 320), (32, 128), 128),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b5 = nn.Sequential(Inception(832, 256, (160, 320), (32, 128), 128),
Inception(832, 384, (192, 384), (48, 128), 128),
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten())
net = nn.Sequential(b1, b2, b3, b4, b5, nn.Linear(1024, 10))
Batch Normalization [2015]
从形式上来说,用 $ \mathbf{x} \in \mathcal{B} $ 表示一个来自小批量 $ \mathcal{B} $ 的输入,批量归一化 $\mathrm{BN}$ 根据以下表达式转换 $\mathbf{x}$:
\[\mathrm{BN}(\mathbf{x}) = \boldsymbol{\gamma} \odot \frac{\mathbf{x} - \hat{\boldsymbol{\mu}}_\mathcal{B}}{\hat{\boldsymbol{\sigma}}_\mathcal{B}} + \boldsymbol{\beta}.\]\(\hat{\boldsymbol{\mu}}_\mathcal{B}\) 是样本均值 \(\hat{\boldsymbol{\sigma}}_\mathcal{B}\) 是小批量 \(\mathcal{B}\) 的样本标准差。 应用标准化后,生成的小批量的平均值为 0 和单位方差为 1。 由于单位方差(与其他一些魔法数)是一个任意的选择,因此我们通常包含 拉伸参数(scale) $\boldsymbol{\gamma}$ 和 偏移参数(shift) $\boldsymbol{\beta}$,它们的形状与 $\mathbf{x}$ 相同。 请注意,$\boldsymbol{\gamma}$ 和 $\boldsymbol{\beta}$ 是需要与其他模型参数一起学习的参数。
\[\begin{aligned} \hat{\boldsymbol{\mu}}_\mathcal{B} &= \frac{1}{|\mathcal{B}|} \sum_{\mathbf{x} \in \mathcal{B}} \mathbf{x}, \\ \hat{\boldsymbol{\sigma}}_\mathcal{B}^2 &= \frac{1}{|\mathcal{B}|} \sum_{\mathbf{x} \in \mathcal{B}} (\mathbf{x} - \hat{\boldsymbol{\mu}}_{\mathcal{B}})^2 + \epsilon.\end{aligned}\]请注意,我们在方差估计值中添加一个小常量 \(\epsilon > 0\),以确保我们永远不会尝试除以零,即使在经验方差估计值可能消失的情况下也是如此。
-
在模型训练过程中,批量归一化利用小批量的均值和标准差,不断调整神经网络的中间输出,使整个神经网络各层的中间输出值更加稳定。
-
批量归一化在全连接层和卷积层的使用略有不同。
-
批量归一化层和 dropout 层一样,在训练模式和预测模式下计算不同。
-
批量归一化有许多有益的副作用,主要是正则化。另一方面,”减少内部协变量偏移“的原始动机似乎不是一个有效的解释。
def batch_norm(X, gamma, beta, moving_mean, moving_var, eps, momentum):
# 通过 `is_grad_enabled` 来判断当前模式是训练模式还是预测模式
if not torch.is_grad_enabled():
# 如果是在预测模式下,直接使用传入的移动平均所得的均值和方差
X_hat = (X - moving_mean) / torch.sqrt(moving_var + eps)
else:
assert len(X.shape) in (2, 4)
if len(X.shape) == 2:
# 使用全连接层的情况,计算特征维上的均值和方差
mean = X.mean(dim=0)
var = ((X - mean) ** 2).mean(dim=0)
else:
# 使用二维卷积层的情况,计算通道维上(axis=1)的均值和方差。
# 这里我们需要保持X的形状以便后面可以做广播运算
mean = X.mean(dim=(0, 2, 3), keepdim=True)
var = ((X - mean) ** 2).mean(dim=(0, 2, 3), keepdim=True)
# 训练模式下,用当前的均值和方差做标准化
X_hat = (X - mean) / torch.sqrt(var + eps)
# 更新移动平均的均值和方差
moving_mean = momentum * moving_mean + (1.0 - momentum) * mean
moving_var = momentum * moving_var + (1.0 - momentum) * var
Y = gamma * X_hat + beta # 缩放和移位
return Y, moving_mean.data, moving_var.data
class BatchNorm(nn.Module):
# `num_features`:完全连接层的输出数量或卷积层的输出通道数。
# `num_dims`:2表示完全连接层,4表示卷积层
def __init__(self, num_features, num_dims):
super().__init__()
if num_dims == 2:
shape = (1, num_features)
else:
shape = (1, num_features, 1, 1)
# 参与求梯度和迭代的拉伸和偏移参数,分别初始化成1和0
self.gamma = nn.Parameter(torch.ones(shape))
self.beta = nn.Parameter(torch.zeros(shape))
# 非模型参数的变量初始化为0和1
self.moving_mean = torch.zeros(shape)
self.moving_var = torch.ones(shape)
def forward(self, X):
# 如果 `X` 不在内存上,将 `moving_mean` 和 `moving_var`
# 复制到 `X` 所在显存上
if self.moving_mean.device != X.device:
self.moving_mean = self.moving_mean.to(X.device)
self.moving_var = self.moving_var.to(X.device)
# 保存更新过的 `moving_mean` 和 `moving_var`
Y, self.moving_mean, self.moving_var = batch_norm(
X, self.gamma, self.beta, self.moving_mean,
self.moving_var, eps=1e-5, momentum=0.9)
return Y
ResNet[2016]

- Residual Blocks / Resnet Block


class Residual(nn.Module): #@save
"""The Residual block of ResNet."""
def __init__(self, input_channels, num_channels, use_1x1conv=False,
strides=1):
super().__init__()
self.conv1 = nn.Conv2d(input_channels, num_channels, kernel_size=3,
padding=1, stride=strides)
self.conv2 = nn.Conv2d(num_channels, num_channels, kernel_size=3,
padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(input_channels, num_channels,
kernel_size=1, stride=strides)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(num_channels)
self.bn2 = nn.BatchNorm2d(num_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
Y += X
return F.relu(Y)
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
def resnet_block(input_channels, num_channels, num_residuals,
first_block=False):
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(Residual(input_channels, num_channels,
use_1x1conv=True, strides=2))
else:
blk.append(Residual(num_channels, num_channels))
return blk
b2 = nn.Sequential(*resnet_block(64, 64, 2, first_block=True))
b3 = nn.Sequential(*resnet_block(64, 128, 2))
b4 = nn.Sequential(*resnet_block(128, 256, 2))
b5 = nn.Sequential(*resnet_block(256, 512, 2))
net = nn.Sequential(b1, b2, b3, b4, b5,
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten(), nn.Linear(512, 10))
Densely Connected Networks (DenseNet) [2017]

ResNet(左)与 DenseNet(右)在跨层连接上的主要区别:使用相加和使用连结.
回想一下任意函数的泰勒展开式(Taylor expansion),它把这个函数分解成越来越高阶的项。在 $x$ 接近 0 时,
\[f(x) = f(0) + f'(0) x + \frac{f''(0)}{2!} x^2 + \frac{f'''(0)}{3!} x^3 + \ldots.\]同样,ResNet 将函数展开为
\[f(\mathbf{x}) = \mathbf{x} + g(\mathbf{x}).\]ResNet 和 DenseNet 的关键区别在于,DenseNet 输出是连接(用图中的 $[,]$ 表示)而不是如 ResNet 的简单相加。 因此,在应用越来越复杂的函数序列后,我们执行从 $\mathbf{x}$ 到其展开式的映射:
\[\mathbf{x} \to \left[ \mathbf{x}, f_1(\mathbf{x}), f_2([\mathbf{x}, f_1(\mathbf{x})]), f_3([\mathbf{x}, f_1(\mathbf{x}), f_2([\mathbf{x}, f_1(\mathbf{x})])]), \ldots\right].\]最后,将这些展开式结合到多层感知机中,再次减少特征的数量。

def conv_block(input_channels, num_channels):
return nn.Sequential(
nn.BatchNorm2d(input_channels), nn.ReLU(),
nn.Conv2d(input_channels, num_channels, kernel_size=3, padding=1))
class DenseBlock(nn.Module):
def __init__(self, num_convs, input_channels, num_channels):
super(DenseBlock, self).__init__()
layer = []
for i in range(num_convs):
layer.append(
conv_block(num_channels * i + input_channels, num_channels))
self.net = nn.Sequential(*layer)
def forward(self, X):
for blk in self.net:
Y = blk(X)
# Concatenate the input and output of each block on the channel
# dimension
X = torch.cat((X, Y), dim=1)
return X
# 由于每个稠密块都会带来通道数的增加,使用过多则会过于复杂化模型。 而过渡层可以用来控制模型复杂度。 它通过 1×1 卷积层来减小通道数,并使用步幅为 2 的平均汇聚层减半高和宽,从而进一步降低模型复杂度
def transition_block(input_channels, num_channels):
return nn.Sequential(
nn.BatchNorm2d(input_channels), nn.ReLU(),
nn.Conv2d(input_channels, num_channels, kernel_size=1),
nn.AvgPool2d(kernel_size=2, stride=2))
b1 = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
# `num_channels`为当前的通道数
num_channels, growth_rate = 64, 32
num_convs_in_dense_blocks = [4, 4, 4, 4]
blks = []
for i, num_convs in enumerate(num_convs_in_dense_blocks):
blks.append(DenseBlock(num_convs, num_channels, growth_rate))
# 上一个稠密块的输出通道数
num_channels += num_convs * growth_rate
# 在稠密块之间添加一个转换层,使通道数量减半
if i != len(num_convs_in_dense_blocks) - 1:
blks.append(transition_block(num_channels, num_channels // 2))
num_channels = num_channels // 2
net = nn.Sequential(
b1, *blks,
nn.BatchNorm2d(num_channels), nn.ReLU(),
nn.AdaptiveMaxPool2d((1, 1)),
nn.Flatten(),
nn.Linear(num_channels, 10))